器械点
器械高
301 1.500
視準点 目標高
水平角 鉛直角 斜距離 斜距離
302 1.100 0.0232 87.1422
101 1.200 89.3419 90.5953 20.040
20.040 ※正しいデータです。
101 1.200 88.3419 90.5953 20.040
20.040 ※エラーを出す為のデータです。
102 1.300 136.1007 90.0445 28.190
28.191
102 316.1001 269.5506
28.190 28.189
101 269.3405 268.5959
20.040 20.041
302 180.0226 272.4530
302 270.1253
101 359.4437
102
46.2030
102 226.2041
101 179.4455
302
90.1304
※詳細説明の④の方法で行います。(⑤の方法は多角観測の
例 題
を参照して下さい)
※PocketPC及びパームサイズPCでは、サイドの部分に[ENTER]と同等に機能するボタンがありますので、それを使用すると観測時に画面をヒットしなくても測定が出来ます。
①JOBデータを登録します。(初めての器械点の時)
※PPMは、メーカー、機種により計算方法が違いますので計算による算出は行いません。
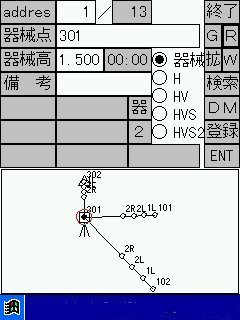
②器械点301を登録します。(器械点、器械高、備考 ※備考の後は[ENT]でも[登録]でも可です)
③後視点302を登録します。(視準点、目標高、備考 ※備考の後は[登録]で登録します。 [ENT]では測定になってしまいます)
④視準点101を登録します。(視準点、目標高、備考 ※備考の後は[登録]で登録します。 [ENT]では測定になってしまいます)
⑤視準点102を登録します。(視準点、目標高、備考 ※備考の後は[登録]で登録します。 [ENT]では測定になってしまいます)
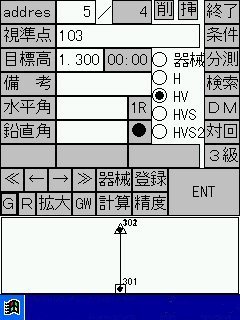
※1Rの登録が終了した状態でGR表示を行うと水平角が0なので視準点が重なって表示されます。
⑥[対回]ボタンを押して対回データの事前登録を行います。
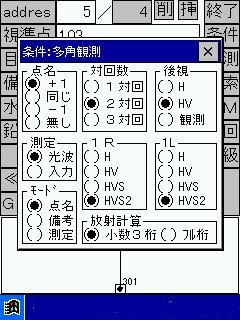
※1Rの視準点名を登録する時は条件のモードを「点名」にしておいた方が処理がやり易くなります。
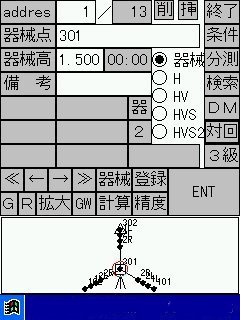
※対回データが作成されたあと画面はGR画面を表示して器械点のレコードに移動します。
※1Rを観測していませんので表示される角度は360°を均等に振り分けた角度になります。
※●は未観測の点です。
⑦全方向の観測を行います。
※条件:多角観測の「モード」を「測定」に設定すると観測時にボタンを押す回数が最小で済みます。
⑧全方向の観測終了。
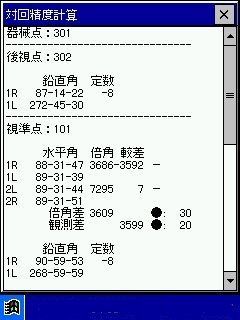
⑨[精度]ボタンを押して精度を確認します。
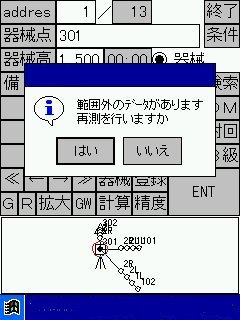
⑩制限値を越えたデータがある時は再測処理に入ります。
⑪再測する対回を指定します。

※どの対回に再測が必要か判断出来る場合もありますが、安全を考えて測定者が再測の対回を指定する方法にしてあります。
⑫再測データの作成に入る前に確認を行います。

⑬再測データが作成され全体のGRを再表示します。
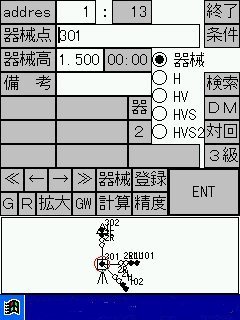
※画面は器械点レコードに移動します。
⑭再測の観測を行います。